In the context of Clock Domain Crossing (CDC), Mean Time Between Failures (MTBF) quantifies how often a synchronization failure might occur.
A failure here refers to the case where:
- A signal crosses from one clock domain to another.
- The signal becomes metastable in the first-stage flip-flop of a synchronizer.
- The metastability persists for more than one clock cycle, so when the second-stage flip-flop samples it, the signal remains metastable.
This results in an unstable or undefined output being propagated into the receiving clock domain — potentially causing logic failures.
📉 Interpreting MTBF Values
-
Higher MTBF → Better system reliability
(i.e., longer time between potential failures) -
Lower MTBF → Higher failure frequency
(i.e., metastability may occur more often)
Thus, designers aim to maximize MTBF to minimize the risk of metastability affecting system behavior.
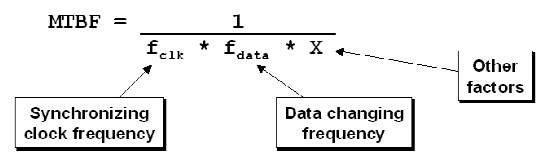
⚙️ Factors Affecting MTBF
According to Dally and Poulton, the MTBF of a synchronizer circuit depends primarily on:
-
Sample clock frequency (fclk):
- How often signals are sampled into the receiving clock domain.
- Higher sampling frequencies reduce MTBF (failures occur more often).
-
Data change frequency (fdata):
- How frequently the asynchronous input signal changes.
- Faster-changing data increases the probability of violating setup/hold times.
📊 Design Implications
From the above relationships, we can conclude:
- High-speed designs (with fast clocks and frequent data changes) tend to have shorter MTBF, meaning metastability failures may occur more often.
- Designers can improve MTBF by:
- Reducing data transition rates across CDC boundaries,
- Allowing more time for metastability to settle (e.g., adding more synchronizer stages), and
- Using flip-flops with shorter metastability resolution times.