In a Multi-Cycle Path (MCP) formulation with feedback, the synchronized enable signal from the receiving clock domain is passed back to the sending clock domain as an acknowledge (ACK) signal.
This creates a closed-loop handshake ensuring that new data is only sent after the previous transfer has been safely received.
⚙️ How It Works
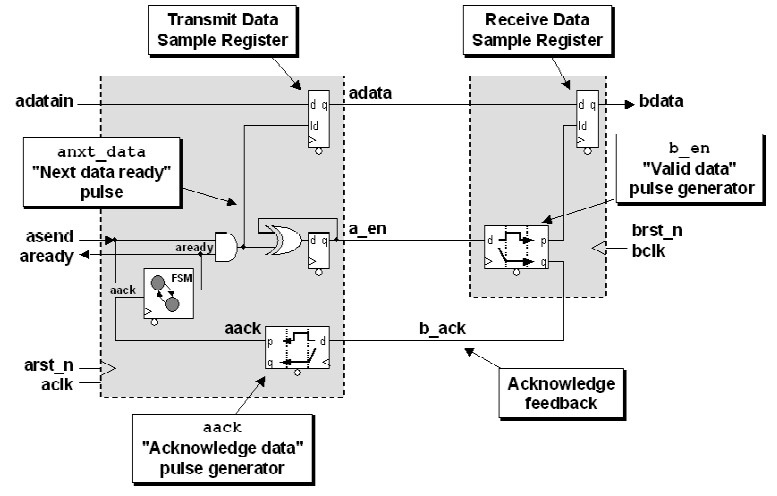
As shown in Figure 21 (conceptually), the system consists of:
a_clk— sending clock domainb_clk— receiving clock domainasend— control signal sent from the sender to initiate a data transferb_ack— acknowledge signal generated in the receiving domainaack— synchronized version ofb_ackin the sending domainaready— a ready signal indicating the sender can send new data againadatain— multi-bit data word being transferred
🔁 Step-by-Step Operation
-
Sender initiates a transfer:
- The sending domain asserts
asendalong with valid data onadatain.
- The sending domain asserts
-
Receiver captures data:
- The
asendtoggle is synchronized into the receiving domain through the MCP synchronizer. - The receiving domain then captures the unsynchronized data once the synchronized enable pulse is detected.
- The
-
Receiver sends back acknowledgment:
- After successfully capturing the data, the receiver toggles or asserts an acknowledge signal (
b_ack).
- After successfully capturing the data, the receiver toggles or asserts an acknowledge signal (
-
Sender receives acknowledgment:
- The
b_acksignal is sent back through another synchronizer to the sending domain, producingaack.
- The
-
Sender updates ready signal:
- A small READY–BUSY FSM in the sending domain uses
aackto set aareadyflag high. aready = 1indicates the receiver is ready for the next data word.
- A small READY–BUSY FSM in the sending domain uses
-
Next data transfer:
- The sender waits until
aready= 1 before changingadatainand re-assertingasendfor the next transfer.
- The sender waits until
🧠 Key Principle
The sender must never update
adatainuntil the receiver acknowledges that the previous word has been captured.
This ensures data integrity and prevents overwriting or metastable sampling.
✅ Advantages
| Advantage | Description |
|---|---|
| Reliable handshake | Guarantees the receiver has captured data before new data is sent |
| Automatic synchronization | Each direction (forward & backward) uses standard synchronizers |
| No fixed timing assumptions | Works across any relative clock frequencies |
| Simple implementation | Only requires a small FSM for ready/busy management |
⚠️ Design Notes
- The READY–BUSY FSM in the sender typically has one active state (BUSY) between sending and acknowledgment.
- This design assumes the receiver is always ready for the next transfer (i.e., no back-pressure mechanism needed).
- The technique can be extended with additional logic if the receiver needs to throttle or pause transfers.
🪄 Typical Sequence Diagram
| Step | Sender (a_clk) |
Receiver (b_clk) |
|---|---|---|
| 1 | Assert asend with adatain |
— |
| 2 | — | Capture adatain on synchronized pulse |
| 3 | — | Toggle b_ack |
| 4 | Receive aack (synced back) |
— |
| 5 | aready = 1 → safe to send next word |
— |
🧩 Summary
- MCP with feedback adds a synchronization loop to confirm successful data transfer.
- It’s ideal for event-driven or sporadic multi-bit transfers across unrelated clock domains.
- Combines the speed of MCP (multi-bit unsynchronized transfer) with the safety of a closed-loop handshake.
Would you like me to include a timing diagram (like Figure 21) to visualize the handshake sequence between asend, adatain, b_ack, and aack? It can make this closed-loop concept much clearer.